
The Tazzari Zero is an ‘ultra-light’ electric car made in Italy (Imola) since 2010 by Tazzari GL S.p.A and has the following technical features:
- aluminium chassis frame resulting in a 540 kg total weight (375 kg without batteries)
- brushless 15 kW (80v) motor (150 Nm, 5500 rpm), air cooled, with motor controller (SME AC-M1)
- gearbox (10:1)
- 13 kWh battery: 24x LiFeYPO4 battery cells (ThunderSky TS-LFP160), 160Ah, 3.3v (total 80v)
- 1.7 kW charger (230v) Zivan NG3 – optional: 2.7 kW (Zivan NG7) and 14 kW (Zivan NGTOP) chargers
- 3x Tazzari batteries balancer modules (BMS) with CAN bus
- 12v DC/DC converter (350W) for car lights etc.
- hydraulic disc brakes (Tazzari)
- tires: 550mm diameter (175/55 R15 – 2.6 bar)
- 4 motor controller modes: race, standard, economy, rain





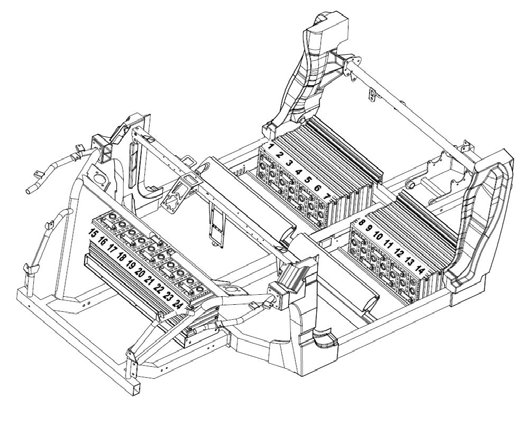
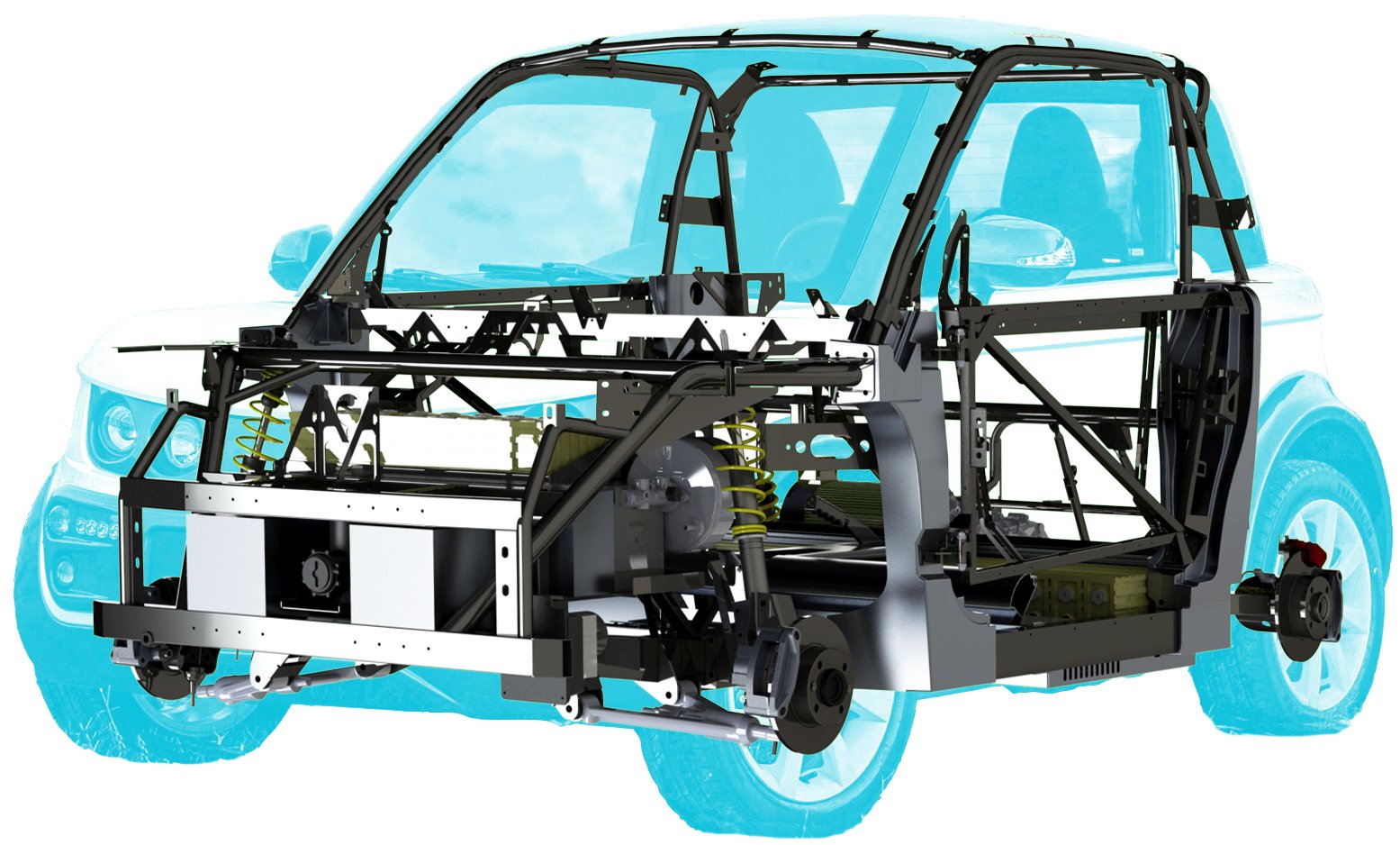
Chassis frame, battery positions
The frame is made out of aluminium. The battery cells are located at the front and under the seats.



LiFeYPO4 battery




- LiFePO4 (Lithium Iron Phosphate) as anode material
- Yttrium in the cathode (high electron transfer at low temperatures, increased capacity at low temp, high C ratings at low temperatures, protects iron phosphate molecular structure from oxidation layer damage during high temperature applications)
battery cell specification: lion_cell_TS-LFP160
Lithium-Ion technologies used in other cars:
- LiCoO2 (Lithium cobalt oxide) : Tesla-like
- LiNiMnCo (Lithium Nickel Manganese Cobalt Oxide): Nissan, Volt
- LiFePO4 (Lithium Iron Phosphate) : Fisker, Tazzari
- LiMn2O4 (Lithium Manganese Oxide) : Nissan, Volt
Battery management system (BMS)
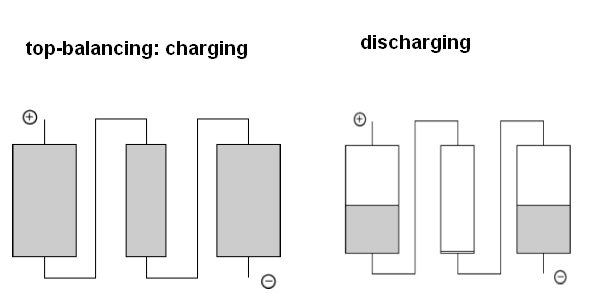
The battery management system (BMS) uses top-balancing strategy – at the end of charging, all cells are balanced to their end of charge voltage (EOCV). The cells can be discharged to the end of discharge voltage (EODV) of the cell with smallest capacity.
Power consumption, range and speed
The car consumes 10 kWh per 100 km. Depending on environment (temperature, slope, etc.) the battery (ThunderSky) has a capacity of 13 kWh and the car can drive up to 100 km with it until re-charging. The top speed is around 100 km/h.
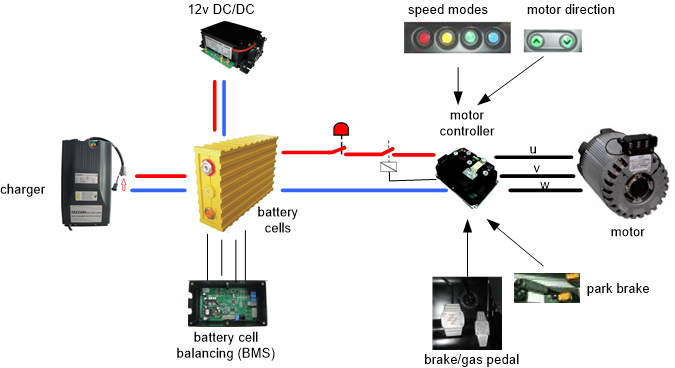
Electric components overview
A DC/DC converts the battery voltage down to 12v for lights, electronics, etc. Brake sensor, gas pedal sensor, motor direction switch and speed modes switches are connected to the motor controller. The motor controller converts the battery DC voltage to motor AC voltage and adjusts speed based on the sensors and motor encoder. More details (actual wiring, controller pinout, schematics etc.) can be found in the Tazzari service manual available for authorized service centers .
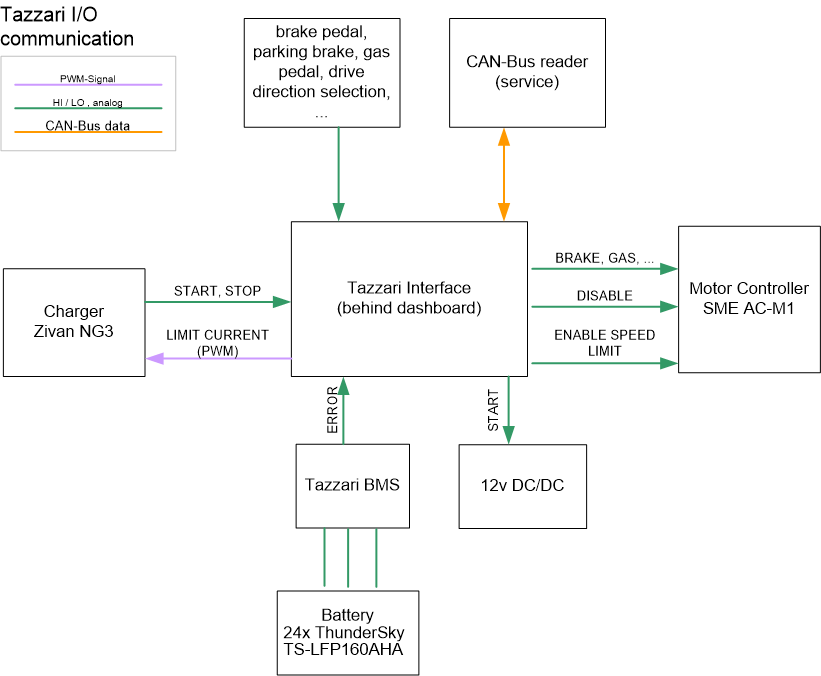
I/O communication overview
The charging start/progress is indicated to the Tazzari interface and the charger current is limited via PWM-signal. If there is some BMS error, the motor controller can be instructed to run at a limited speed. A CAN bus allows reading individual battery cell voltages, temperatures, charging current etc.

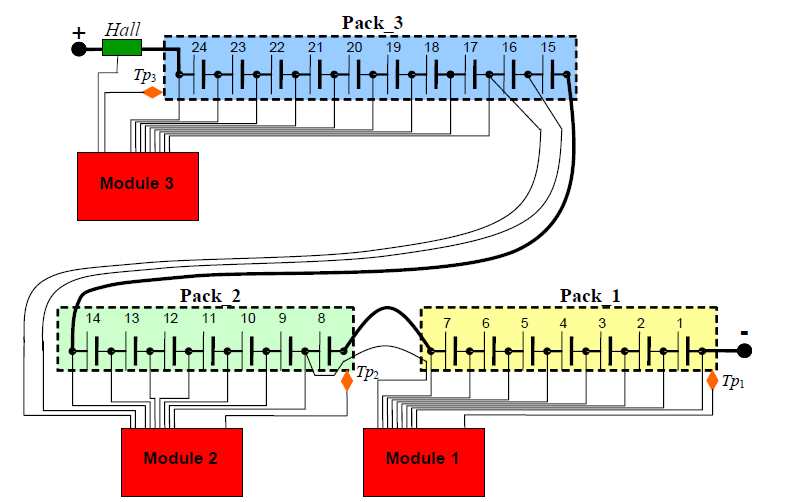
Tazzari CAN bus, battery logging etc.
A CAN bus allows reading individual battery cell voltages, temperatures, charging current etc.

(photo: Tazzari CAN Logger)
Battery logging
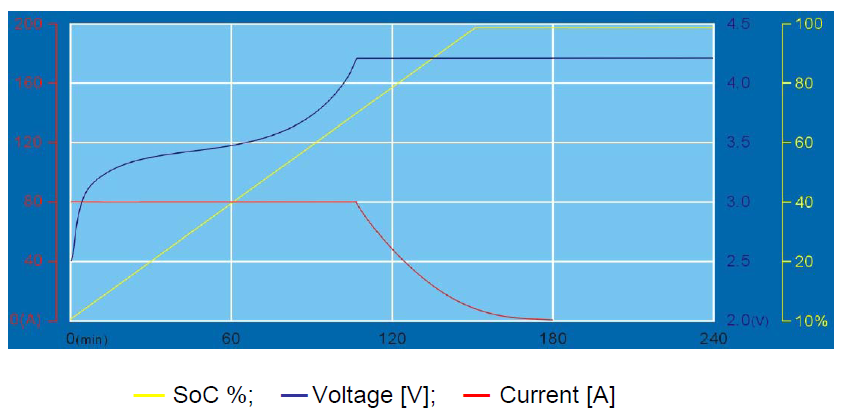
The 24 battery cell voltages (2.7v ~ 3.3v in the example below) and total current (0 ~ 150 Ampere in the example below) can be monitored via CAN bus. The plot below shows the SD card log measurements of 3 phases (ilde, driving, idle):

Another plot showing charging and balancing all cells over night:
![]()

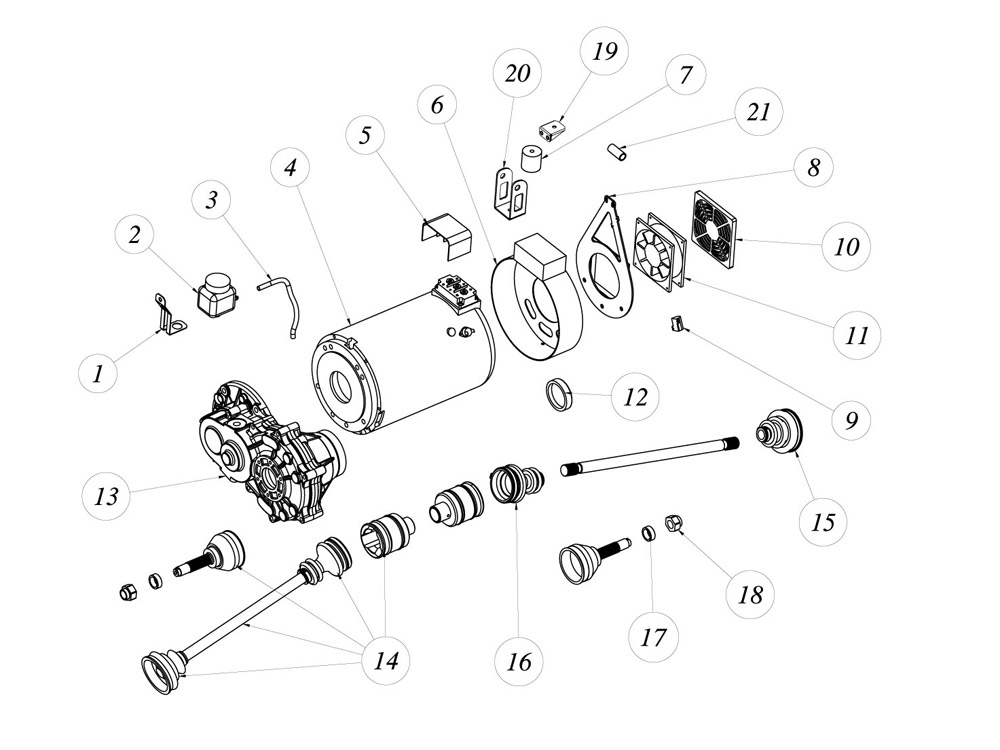
Motor and gearbox
The Tazzari car uses a 10:1 gearbox (one gear) – The gearbox reduces the motor rotations by factor 10.

(source: Tazzari Yahoo Forum)
Hydraulic disc brakes
Brake pads (Stilfreni) also found in Microcar MC1/MC2 (version 1)

(source: Tazzari Yahoo Forum)
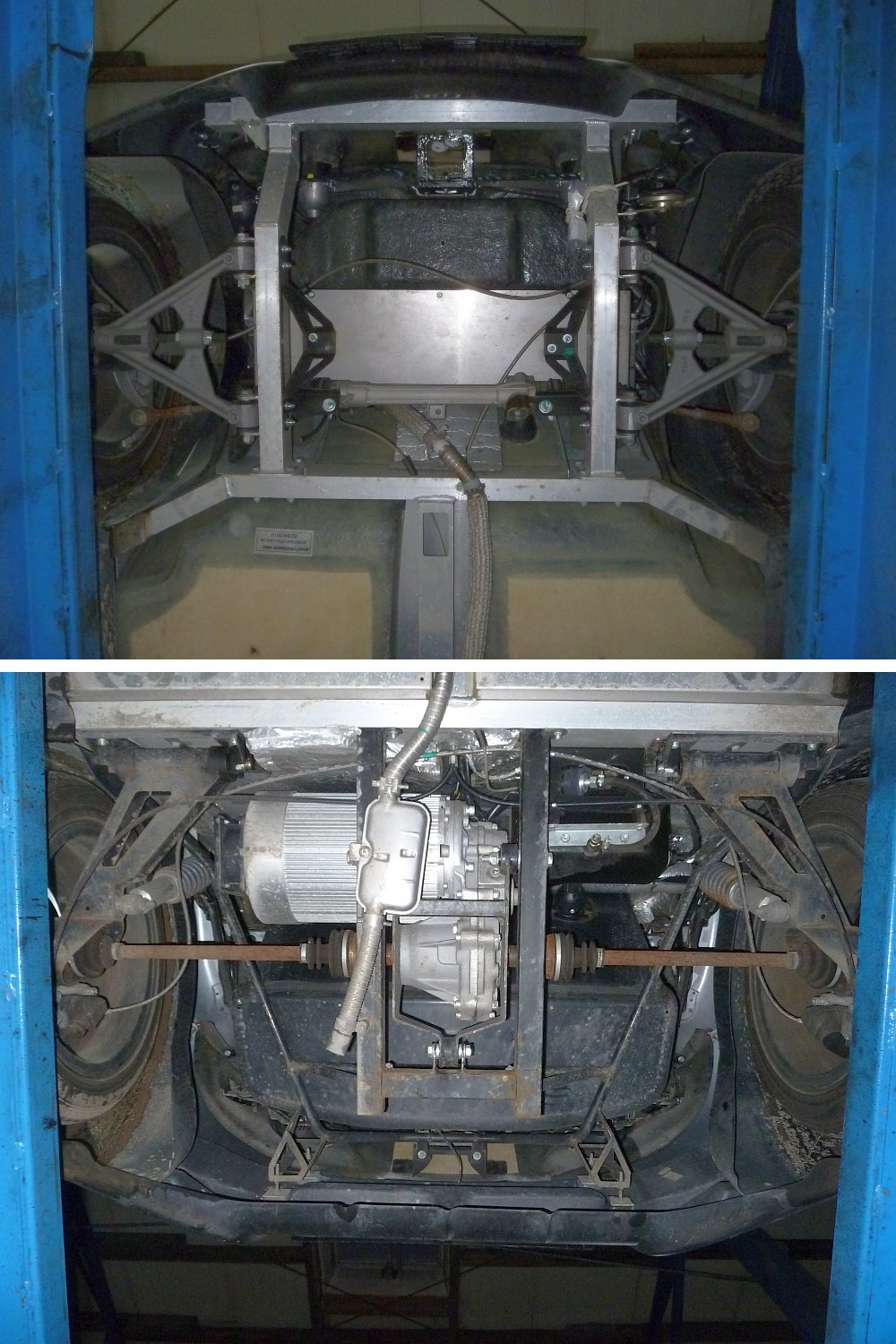
Rear axle, motor transmission, rear hanging
The Tazzari car is using a rear wheel drive.

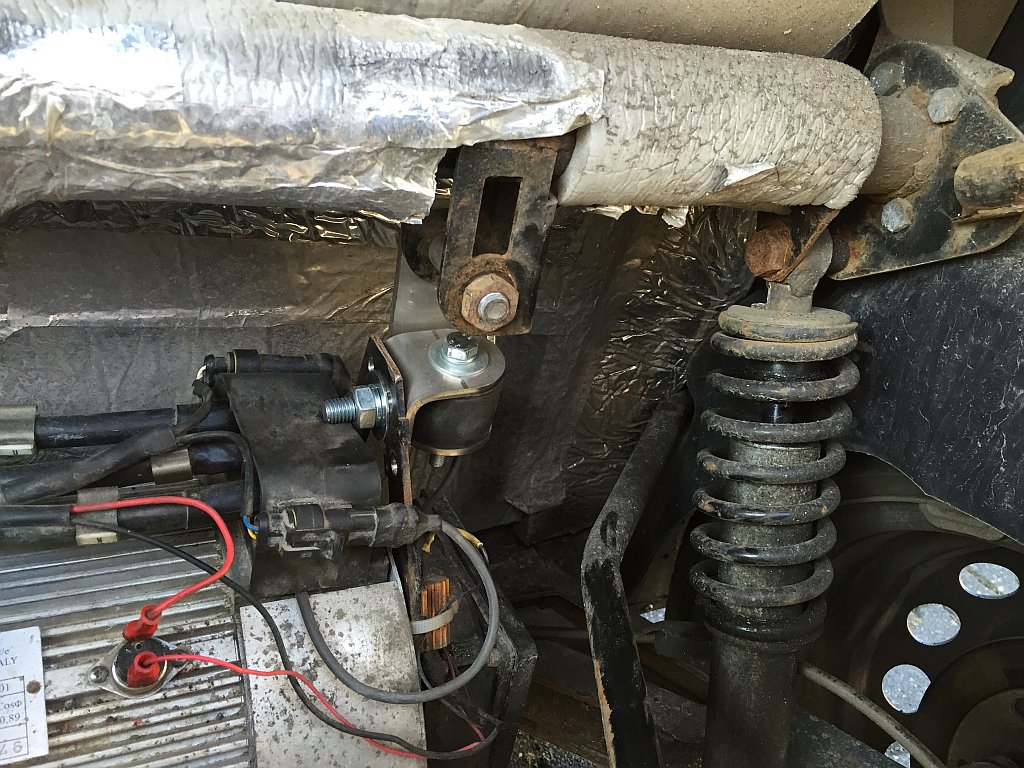
(source: Tazzari Yahoo Forum)
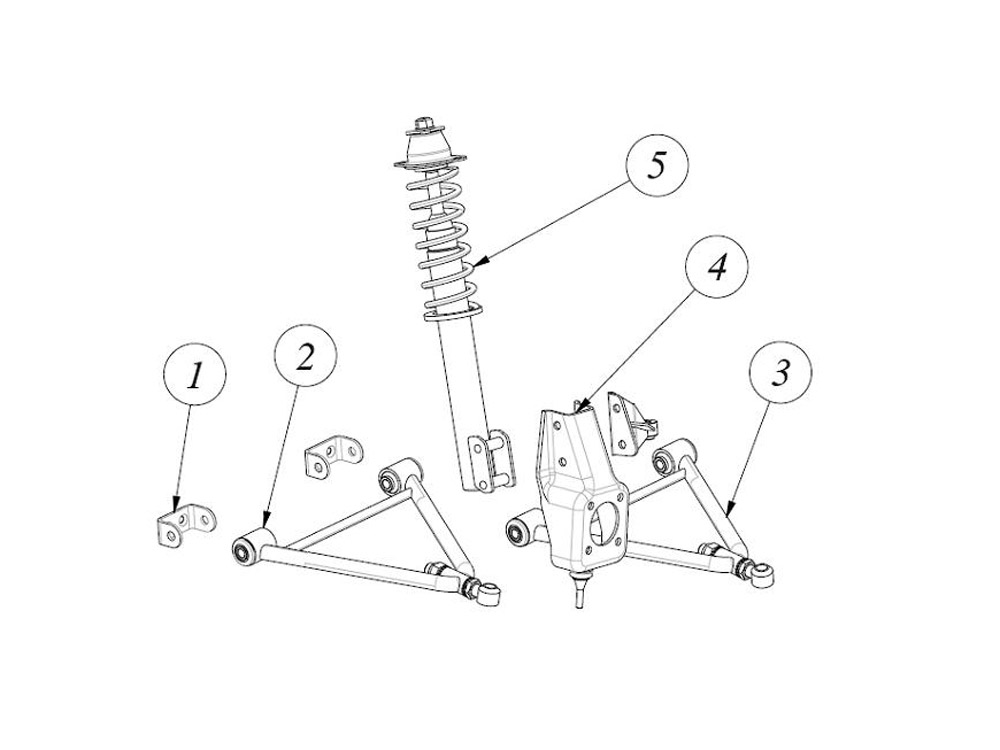
Front hanging, steering, wheel bearing
The Tazaric car is using a rack-and-pinion steering. The bearings used in the Tazzari car: SKF VKBA 559
The ball rod end (cone 10mm, thread M12, length 87mm) is compatible with Fiat Panda/Seat Marbella (Panda model 127)


{kind=link}
(source: Tazzari Yahoo Forum)
Motor controller (SME AC-M1)
The Tazzari car uses regenerative braking. The motor control algorithm used by the SME motor controller is known as ‘Field Oriented Control’.
The motor controller diagnostic can be performed and motor controller parameters can be adjusted by authorized service centers using ‘SME EyePlus’ software (now ‘Software TAU for SME Controllers’).
When the vehicle is on release or reverse braking ramp, motor works as generator, and battery voltage could exceed over-voltage limit. The solution may be to reduce the release and reverse braking ramp.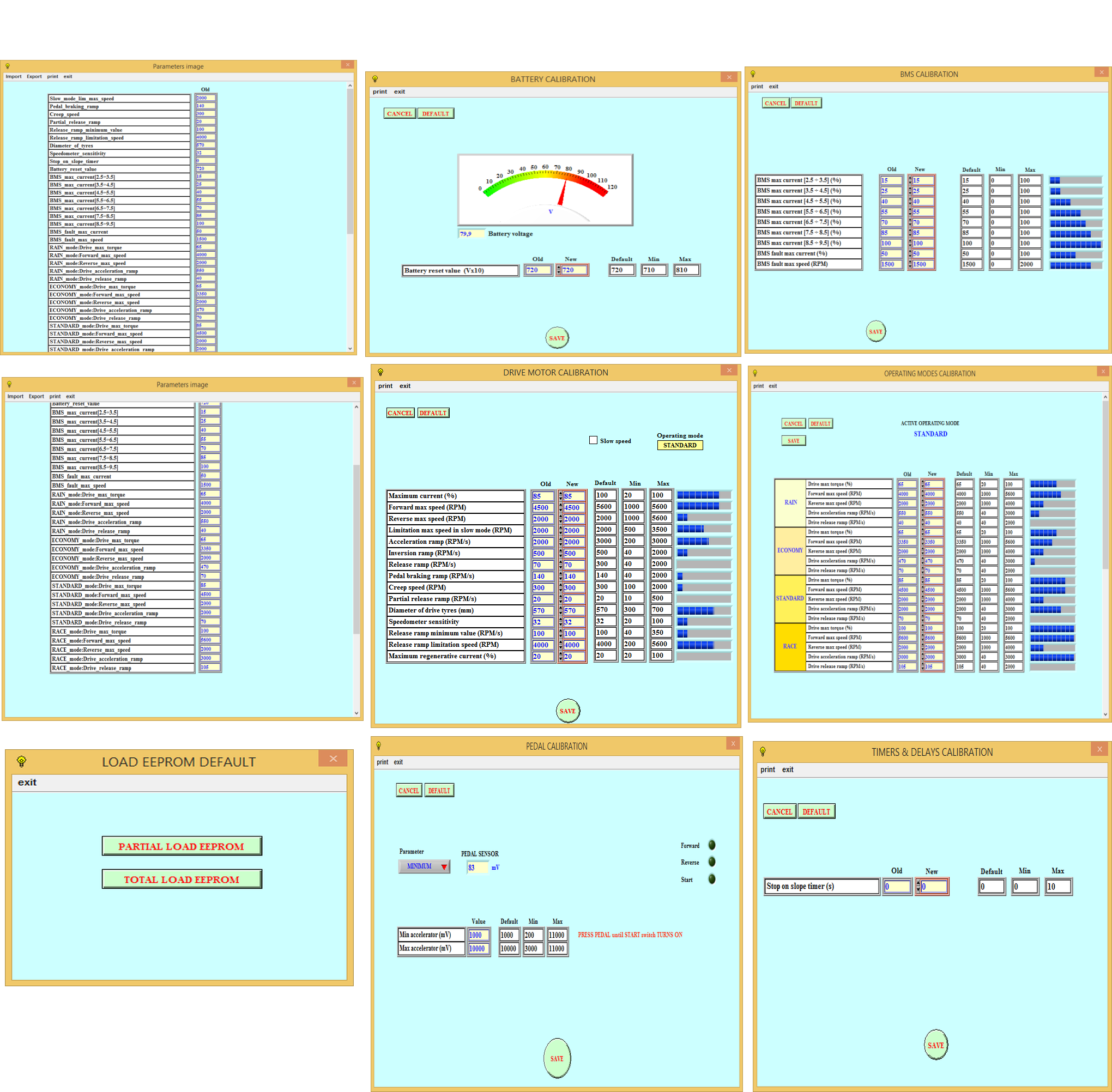

Parameters:
- Acceleration ramp (acceleration with accelerator pedal pressed)
- Release ramp (deceleration with accelerator pedal released)
- Inversion ramp (deceleration in inversion)
- Pedal braking ramp (deceleration with pedal brake pressed)
- Creep speed (if speed is greater then this threshold, speed reference becomes a parabolic function of the accelerator potentiometer voltage)
- Partial release ramp (parameter that softens the inversion ramp if motor is working with low rpm)
Slow_mode_lim_max_speed 2000 Pedal_braking_ramp 140 Creep_speed 300 Partial_release_ramp 20 Release_ramp_minimum_value 100 Release_ramp_limitation_speed 4000 Diameter_of_tyres 570 Speedometer_sensitivity 32 Stop_on_slope_timer 0 Battery_reset_value 720 BMS_max_current[2.5÷3.5] 15 BMS_max_current[3.5÷4.5] 25 BMS_max_current[4.5÷5.5] 40 BMS_max_current[5.5÷6.5] 55 BMS_max_current[6.5÷7.5] 70 BMS_max_current[7.5÷8.5] 85 BMS_max_current[8.5÷9.5] 100 BMS_fault_max_current 50 BMS_fault_max_speed 1500 RAIN_mode:Drive_max_torque 65 RAIN_mode:Forward_max_speed 4000 RAIN_mode:Reverse_max_speed 2000 RAIN_mode:Drive_acceleration_ramp 550 RAIN_mode:Drive_release_ramp 40 ECONOMY_mode:Drive_max_torque 65 ECONOMY_mode:Forward_max_speed 3350 ECONOMY_mode:Reverse_max_speed 2000 ECONOMY_mode:Drive_acceleration_ramp 470 ECONOMY_mode:Drive_release_ramp 70 STANDARD_mode:Drive_max_torque 85 STANDARD_mode:Forward_max_speed 4500 STANDARD_mode:Reverse_max_speed 2000 STANDARD_mode:Drive_acceleration_ramp 2000 STANDARD_mode:Drive_release_ramp 70 RACE_mode:Drive_max_torque 100 RACE_mode:Forward_max_speed 5600 RACE_mode:Reverse_max_speed 2000 RACE_mode:Drive_acceleration_ramp 3000 RACE_mode:Drive_release_ramp 105
Top lock recovery
If the bowden cable for the top lock is broken, you can manually unlock the top lock from the car bottom side.

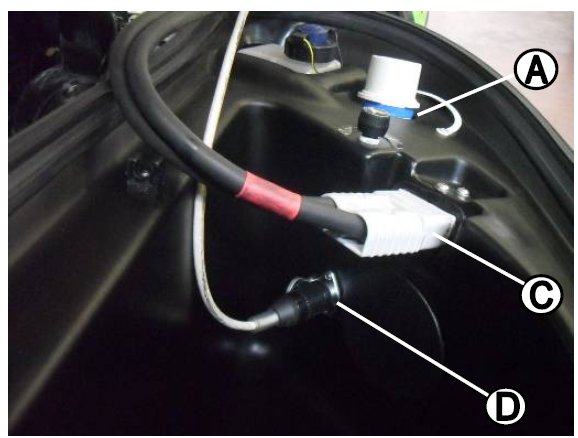
Charger, charging station
The internal car charger uses a CEE-16 socket (A). For super-fast (external) charging there is a battery (Anderson 175A) socket (C) and charger control socket (D). The BMS can limit the charging current via the charger control socket.

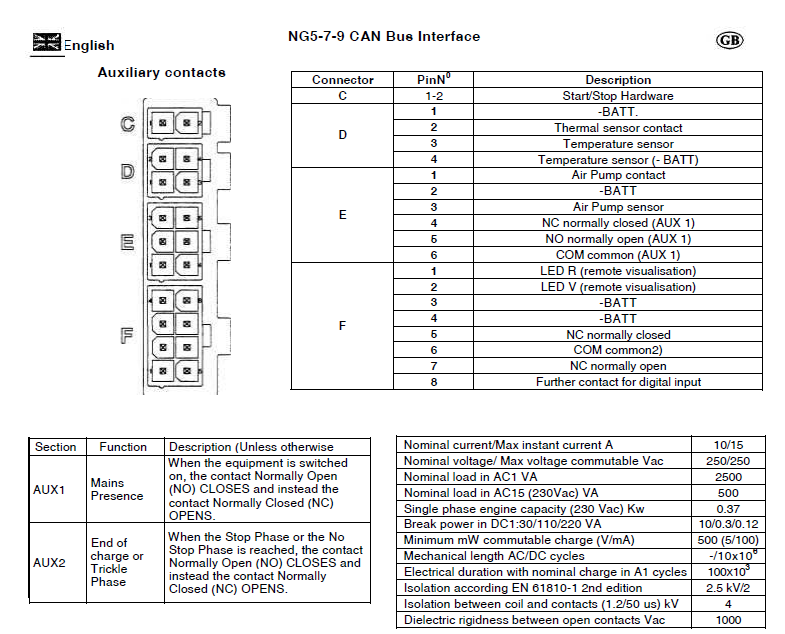
Fast charger (Zivan NG5-7-9) connector pinout


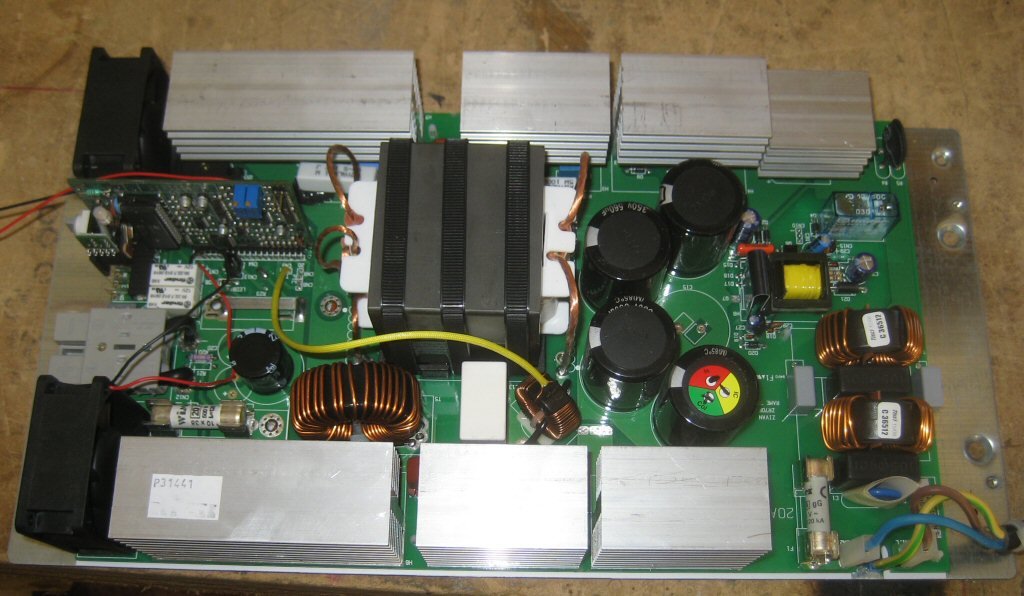
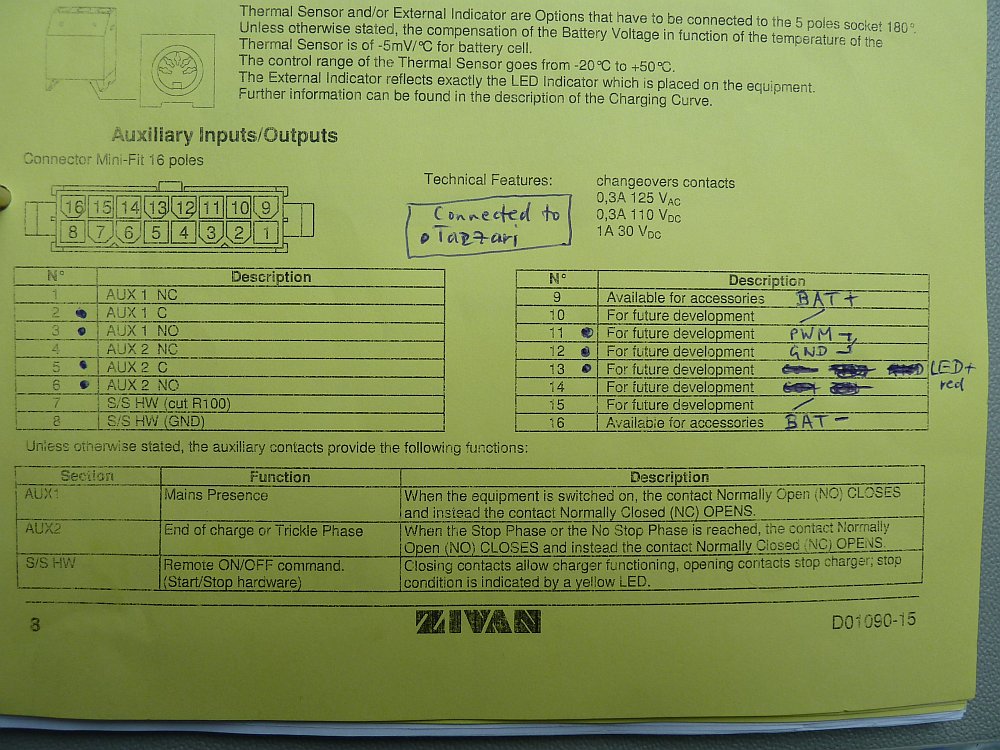
Super-fast charger (Zivan NGTOP) connector pinout (Mini-Fit 16 poles)
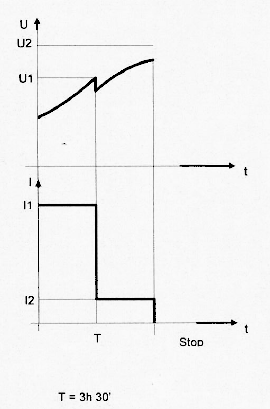
Zivan chargers are available for a wide range of voltages. Inside the charger there is a pot for max. voltage (marked U) and another one for max. current (marked I). The voltage can be adjusted by 10-20%.
I: 115A I1: 10A U2: 84V
U: 102V U1: 80V I2: 5.5A
AUX1: mains presence indication
AUX2: charge in progess indication
PWM: charge current control by BMS (must be existing for charger to work)
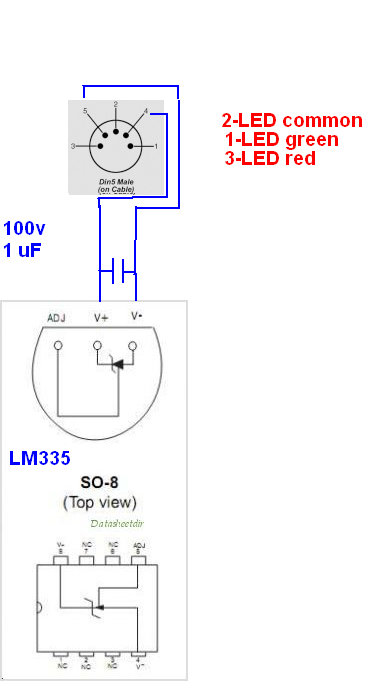
DIN 5 socket: temperature probe


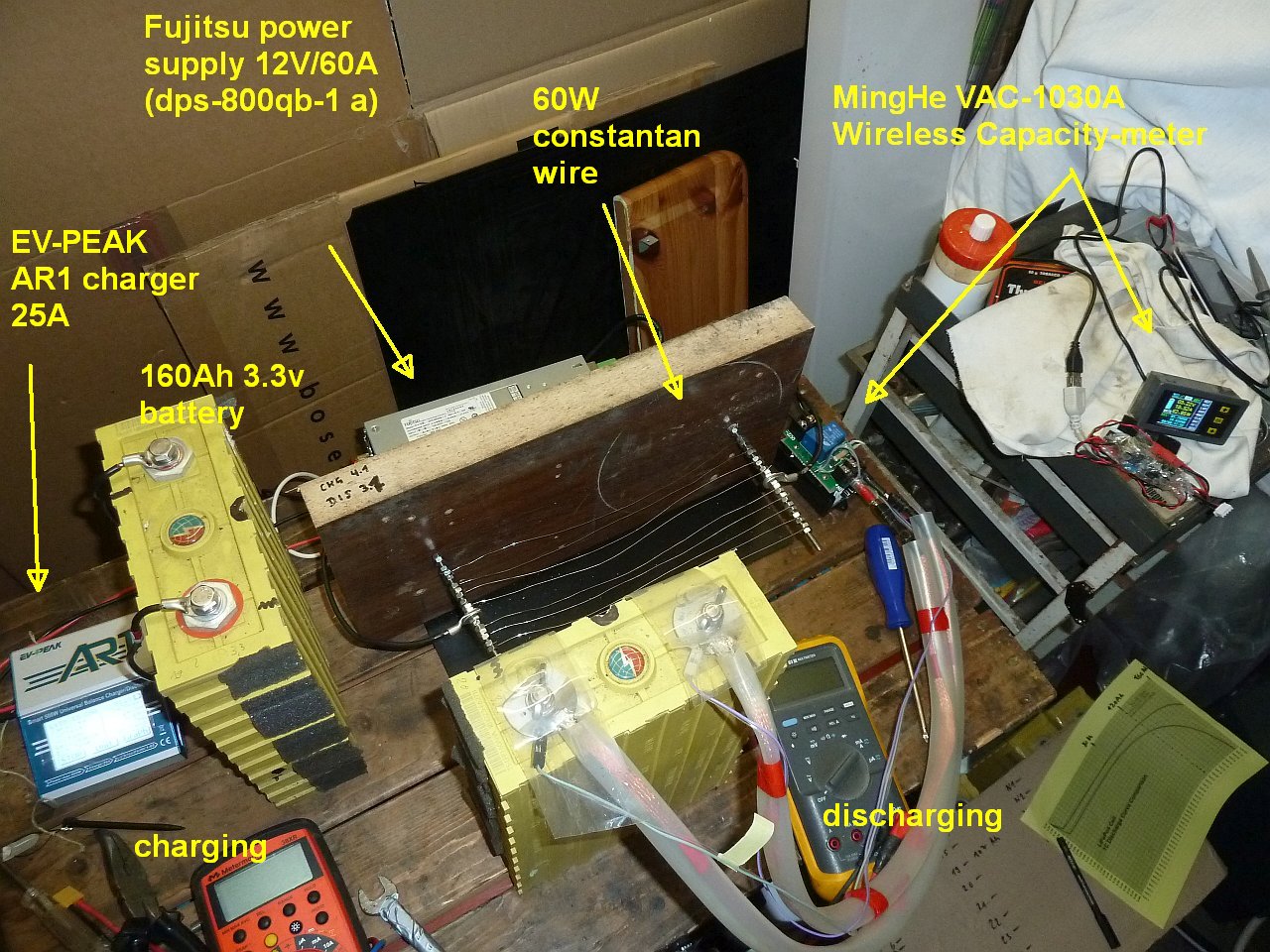
Do-It-Yourself single cell charging/discharging/capacity meter
History

Tazzari GL first prototype, Imola 2006 (source: Tazzari Google+)
Excursion: brake requirements for technical control board (German TÜV)
1) gradual braking must be above 40 %
Zpm= ((F1 + F2) / Pm) * 100
Zpm: gradual braking (of empty or loaded vehicle) in percent (%)
F1, F2: braking force of axle 1 or 2 in Newton (N)
Pm: mass of vehicle in Newton (N)
Fh : foot force at braking pedal in Newton (N)
for vehicle above 25 km/h:
requirements:
Fh < 700 N
Zpm > 40
2) difference of braking forces of one axle between left and right side must be below 25 %
Zlr: difference of braking forces of one axle between left and right side in percent (%)
FL: axle left side braking force in Newton (N)
FR: axle right side braking force in Newton (N)
abs(FL-FR): absolute value of difference between FL and FR
max(FL, FR): maximum of braking force of axle left and axle right side
Zlr = abs(FL-FR) / max(FL, FR) * 100
requirement: Zlr < 25
External links
- German Tazzari distributor, service and repair: Alternative Fahrzeugtechnologie
- Tazzari online shop and car configurator: Tazzari EV
- Zivan chargers: ATECH Antriebstechnik für Elektrofahrzeuge Vertriebs GmbH
- SME brushless motors: SME Group
- battery: Winston/ThunderSky
- Italian Forum: Tazzari World Forum
- German Forum: Elektroauto TAZZARI ZERO
- Tazzari Google+ (more models, photos etc.): Tazzari EV Zero Emission Mobility
- Open Source car platform: OSVehicle
- Tazzari YouTube video: NWG Zero Electric
Comments or questions? Add your comment below…
Hello,
Very interesting information about the Tazzari Zero car. Is it possible to get more detailed information, for example: plug B7 of the logic main board, that is B.M.S communication with the logic board.
Thank you
Best Regards