Why adding an IMU to camera-based odometry? An IMU improves accuracy and robustness of camera-based odometry.
My setup
- monochrome global shutter camera: mvBlueFox-MLC200wG (ON Semiconductor MT9V034 digital image sensor)
important: time-synchronized to IMU
- 132 degree fisheye lense
- IMU: GY-88 (MPU6050)
- rovio for visual inertial odometry
- kalibr for camera-to-IMU calibration
Checkerboard
We will need to print out a checkerboard pattern for camera calibration:
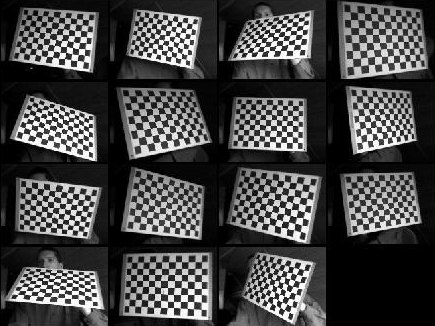
Camera intrinsics
Using the checkerboard pattern, find out the intrinsics of your camera. See ‘How to Calibrate a Monocular Camera‘.
rosrun camera_calibration cameracalibrator.py –size 9×6 –square 0.028 image:=/cam0/image_raw camera:=/cam0
Pinhole camera model:
fu, fv: focal-length (e.g. 410, 412)
pu, pv: principal point (e.g. 374, 243)
Distortion model: radial-tangential (radtan):
k1, k2, r1, r2: distortion coeffs (e.g. -0.2, 0.07, 0, 0)
camchain.yaml
cam0: camera_model: pinhole intrinsics: [fu fv pu pv] distortion_model: radtan distortion_coeffs: [k1 k2 r1 r2] rostopic: /cam0/image_raw resolution: [752, 480]
AprilTags
We will need to print out 6×6 AprilTag patterns (DINA0) for the camera-to-IMU calibration:
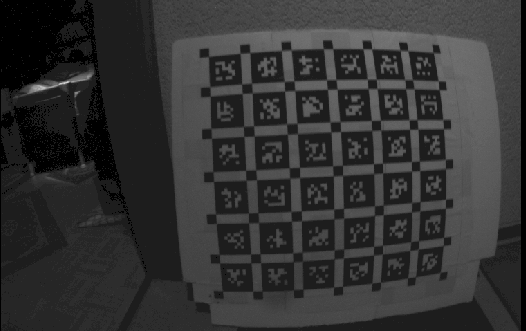
Camera-to-IMU calibration
This will calculate the camera extrinsics (rotations, translations for the camera with respect to the IMU).
Using 6×6 AprilTag patterns, record slow translations/rotations of the fixed camera+IMU sensor into a bagfile.
Run the camera-to-IMU calibration:
kalibr_calibrate_imu_camera –bag recording.bag –cam camchain.yaml –imu imu.yaml –target target.yaml
Verify the calibration errors, they all should be below 0:
Reprojection error (cam0) [px]: mean 2.7, median 2.31432653786, std: 1.8 Gyroscope error (imu0) [rad/s]: mean 0.007, median 0.007, std: 0.003 Accelerometer error (imu0) [m/s^2]: mean 0.02, median 0.01, std: 0.02
Convert the calibration results to rovio config file:
kalibr_rovio_config –cam camchain.yaml
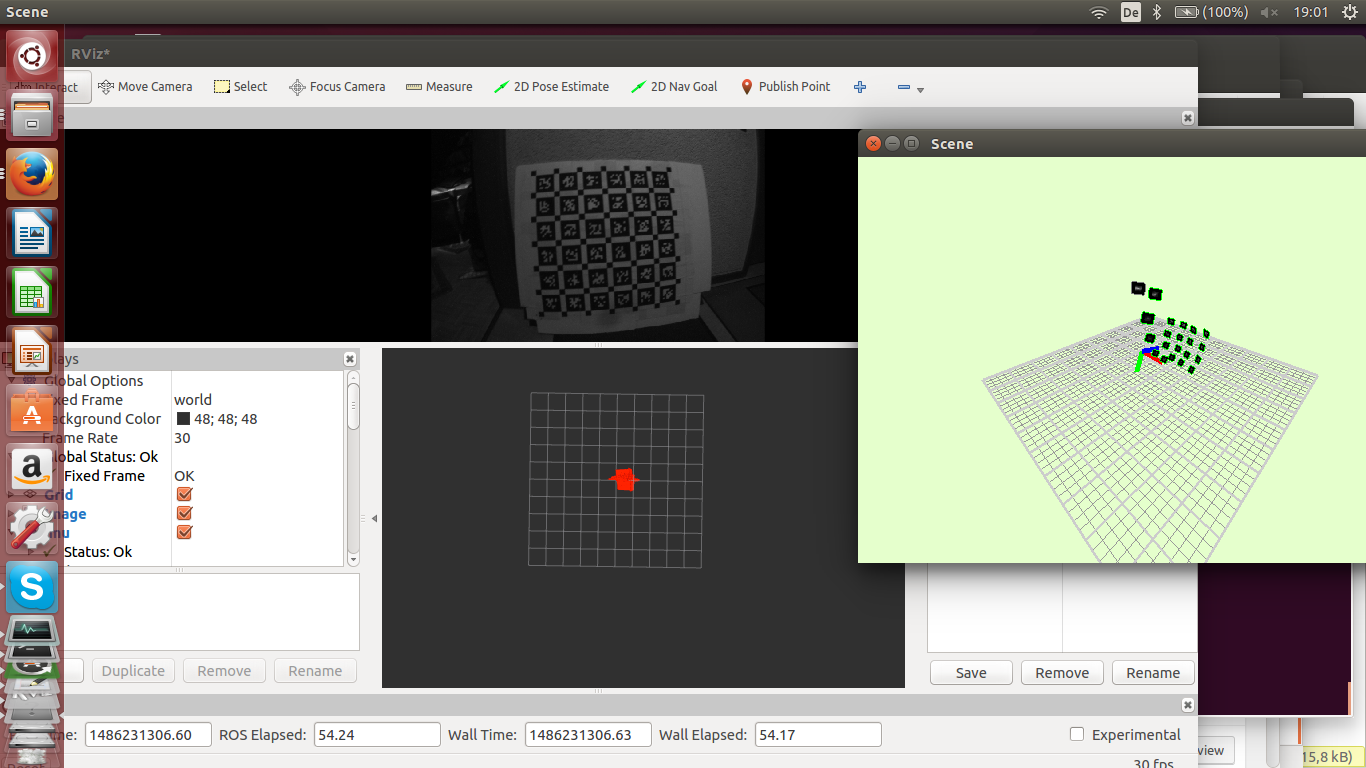
rovio
Run rovio for a static scene (not moving). If the position drifts, increase initial covariances and prediction noise.
Test on a recording with faster moving. I experience drift now that I will try to solve.
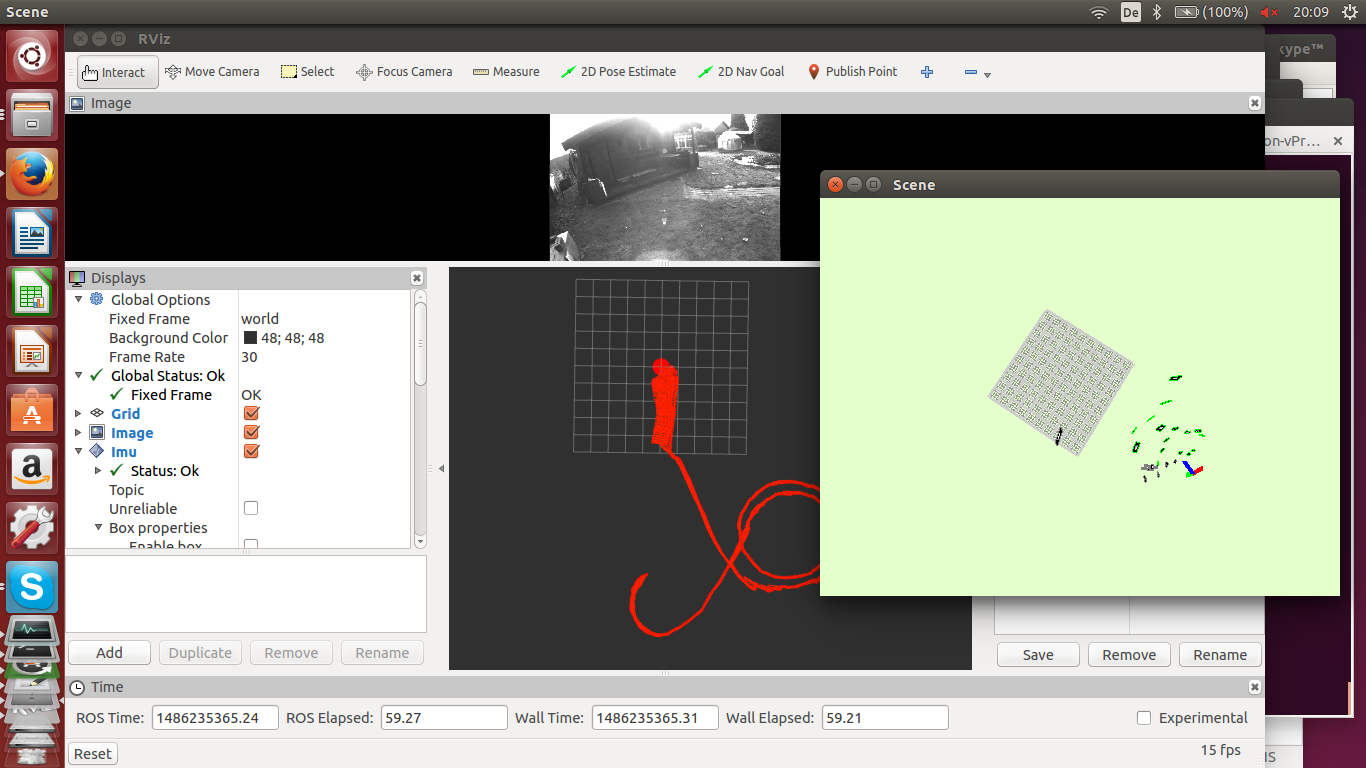
to be continued/refined…