Principle:
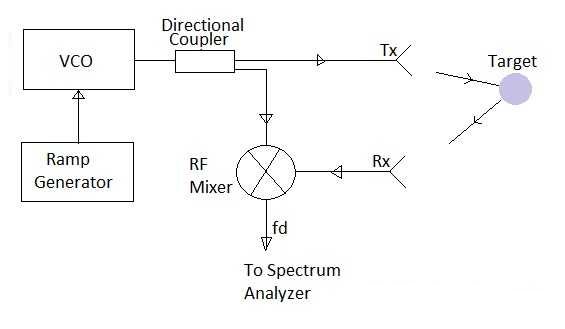
A frequency-modulated continuous-wave radar (FMCW) uses a voltage controlled oscillator to generate a sweep signal. The Tx/Rx-mixed signal (beat frequency) is analysed by a window FFT to get the ranges to all obstacles.
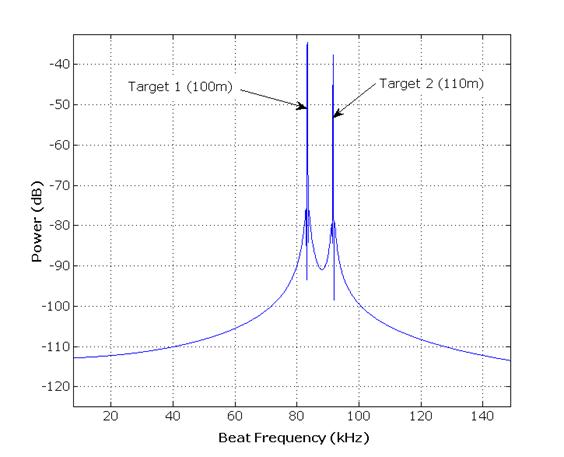
Result of one FFT:
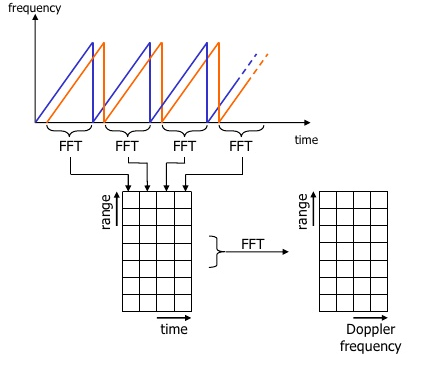
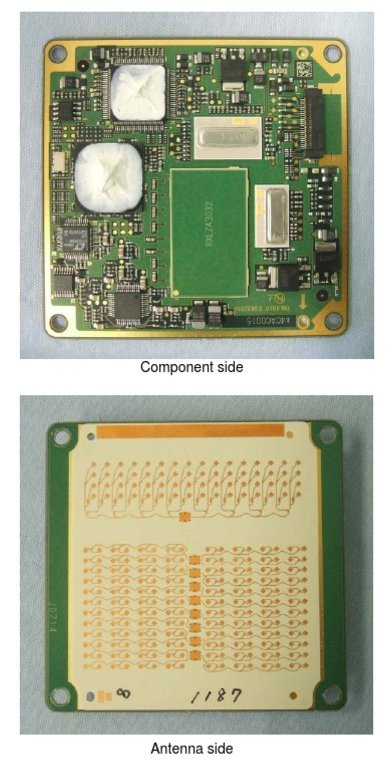
2D / 3D:
For 3D measurements, an antenna matrix is used:
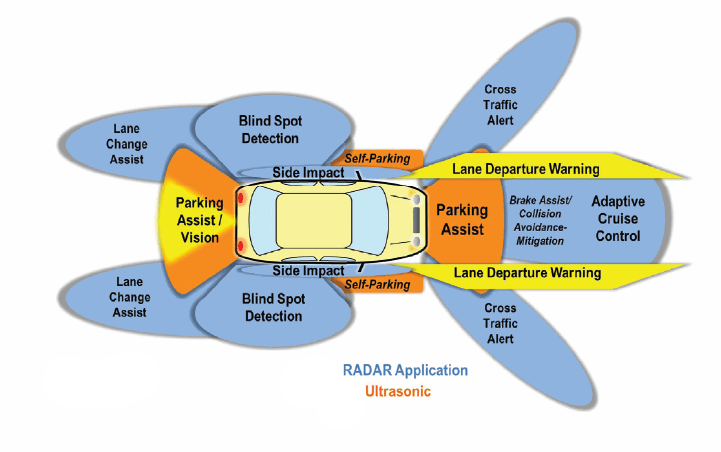
Types:
- Adaptive Cruise Control (ACC) / Distanz
- Lange Change Assist / Spurwechsel Assistent
Manufacturers:
- Continental ARS308
- Continental ARS3-A (BMW F)
- Continental ARS410DP (A0009053607) (Mercedes)
- Bosch LRR2
- Bosch LRR3SCU (4G0 907 541) (Audi A6, A7), (0203300193) (Mercedes X117-GLA)
- Bosch MRR1Rear (4M0 907 566) (Audi Q7 4M A4 S4 8W SWA)
- Bosch MRR1Plus (4G0 907 561 D, A) (Golf7 Sportsvan, Audi A6 4G)
- TRW Autocruise AC20 (3AA907567, 3C0907567H) (VW Passat)
- TRW Autocruise AC10
- Distronic ACC A2059005918 (Mercedes Benz GLC 253)
- Hella (kd49-67y80a) Mazda CX-5
- Hella (GHP967Y80C) Mazda 3, 5, 6
- Hella SWA SG2 (8K0907566B) (Audi A4 S4 RS4 8K)
- xxxx (ag9n-9g853-cb) (2011 Ford Mondeo Titanium MK4)
Software protocol:
Automotive radar sensors use the CAN bus to allow the vehicle main control unit (MCU) to control the device or receive data from it.
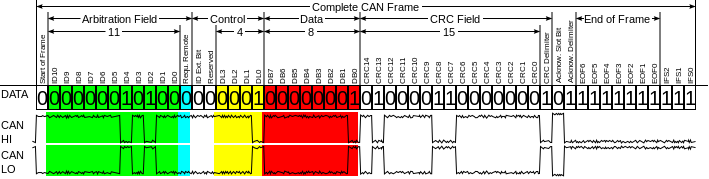
Source: https://en.wikipedia.org/wiki/CAN_bus