Schon mal einem LiDAR Sensor Live beim Scannen zugesehen? Mit folgenden drei einfachen Schritten kann man dies mit jedem Neato Staubsauger-Roboter machen wenn dieser über eine USB-Schnittstelle verfügt:
- USB-Anschluss des Neato Roboters suchen und via USB-Kabel mit dem PC verbinden.

- Neato USB-Treiber installieren: Hierfür einfach eine ältere Versionsnummer bei neato robotics auswählen und die Neato-Update-Software herunterladen und installieren – darin enthalten ist dann der passende USB-Treiber – das Roboter-Update nach der Installation der Software nicht durchführen.
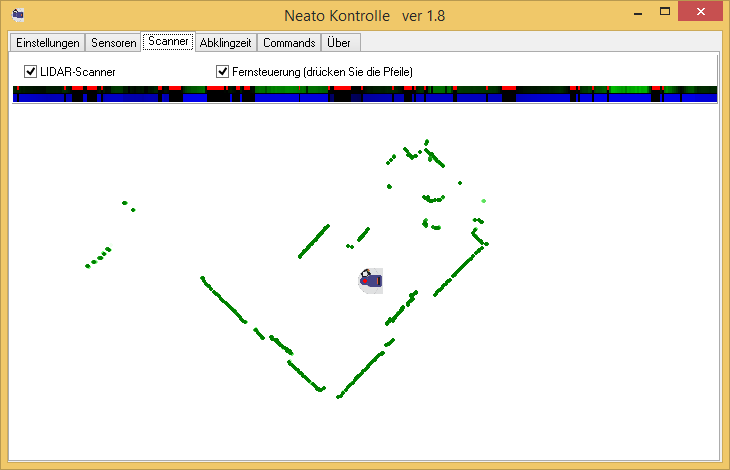
- NeatoControl herunterladen und starten (Weitere Details zum Programm findet man hier). Nun kann man sich die Bilder des LiDAR Sensors in Echtzeit ansehen und den Roboter mit den Pfeiltasten fernsteuern:
- Optional (für Interessierte): das Programm benutzt die von neato robotics veröffentlichte Spezifikation der Datenkommunikation zum Roboter – damit kann man praktisch alles mit dem Roboter anstellen (alle Sensoren auslesen, alle Aktoren ansteuern usw.):
http://www.neatorobotics.com/resources/programmersmanual_20140305.pdf
http://www.neatorobotics.com/lab/linux/
