Autonomous Robots Engineering
We build autpilot software (localization, mapping, path planning, navigation, obstacle avoidance etc.) and hardware components (PCB, motor controllers for steering, traction etc.) for autonomous self-driving robots for various applications:
- small robotic garden mowers (rotary mower, reel mower, …)
- ride-on mower conversions (e.g. golf mower)
- snow blower robots
- indoor / outdoor transport robots
- seed and plant robots
- leaf / weed removal robots
- etc.
Below you can find two examples of software and hardware components for self-driving robotic lawn mowers we built.

1. Turn your park or sports field mower into an autonomous mower with precise virtual perimeter mowing, obstacle detection, arbitrary mowing patterns, arbitrary turns etc.:
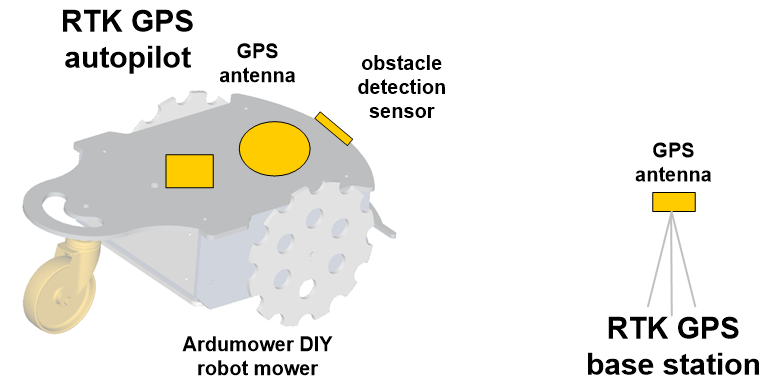
- Autonomous mower retrofit kit (autopilot for RTK-GPS based localization, radar-based obstacle detection)
- Autopilot software (automatic mapping & path tracking) for autonomous mowers
- Mobile apps for autonomous mowers (Android and iPhone)
Autopilot software features:
- cm-precise mowing (based on RTK -GPS localization)
- arbitrary shapes and mowing patterns (can be adjusted to your target domain, football ground, farming, park, private garden etc.)
- automatic mapping of the path layout after learning the perimeter (can be adjusted to your target domain like football ground, farming, park, private garden, golf course etc.)
- shortest-path finding with obstacle avoidance
- arbitrary clearance distance to perimeter and obstacles
- adjustable to other hardware (e.g. riding mowers, seed and plant robots), different types of steerings like differential wheel steering or ackerman steering and path planning and tracking
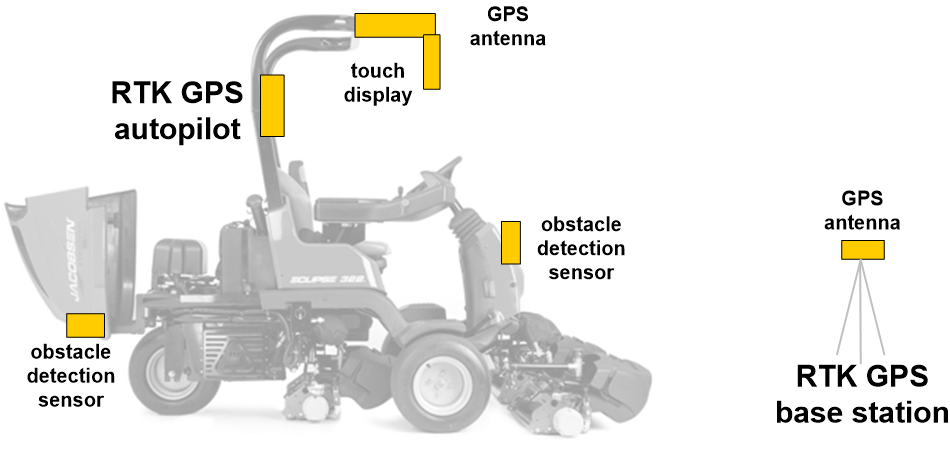
Sports field mower retrofit kit overview:
The front (and rear) obstacle detection can detect people, trees etc. and smaller objects. The autonomous mower will slow down when objects are approaching and stop when objects are getting too near.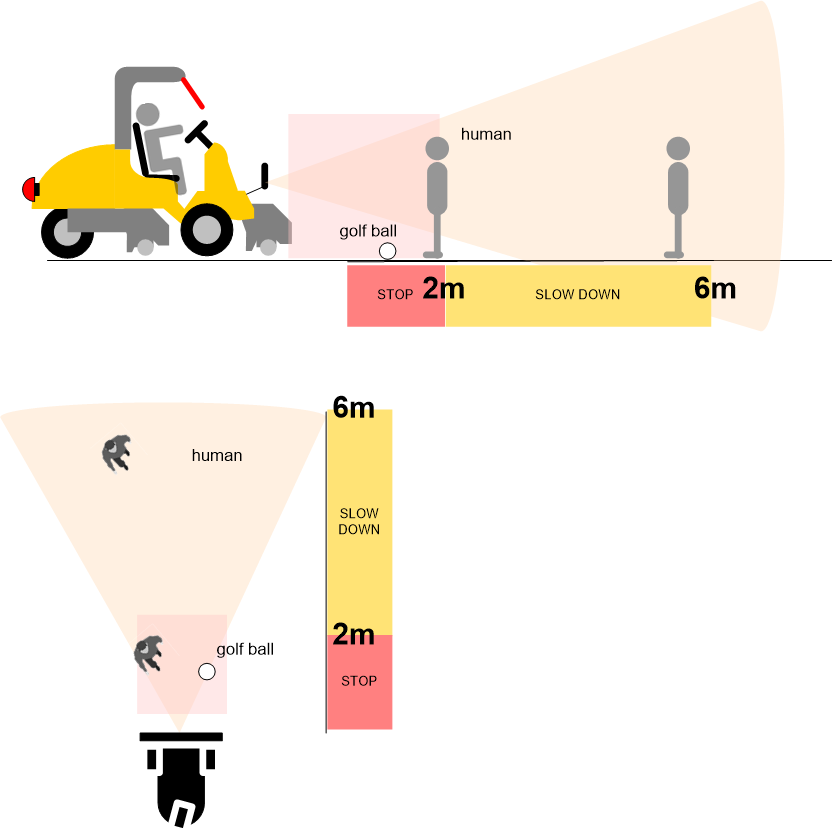
Testing camera-based detection of balls and flagpoles (detection works at night and day):
Autonomous mower test at Golfclub Herford e.V., Germany:
Path planning and tracking for larger robots (sports field, park, private garden etc.):
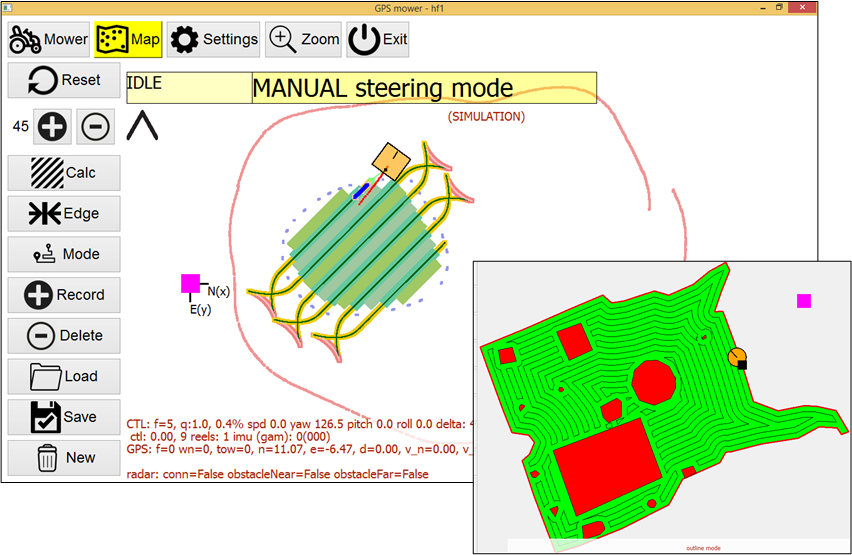
User interface:
It’s time to become a smart green-keeper

2. Autonomous garden lawn mower, path planning and cm-precise tracking for small robots:
Ground obstacle detection (obstacles, animals, humans) in sunlight – robot stops when obstacle detected:
Ground obstacle detection (obstacles, animals, humans) in darkness – left side shows RGB image, right side shows depth image and detections. Works at day and night:
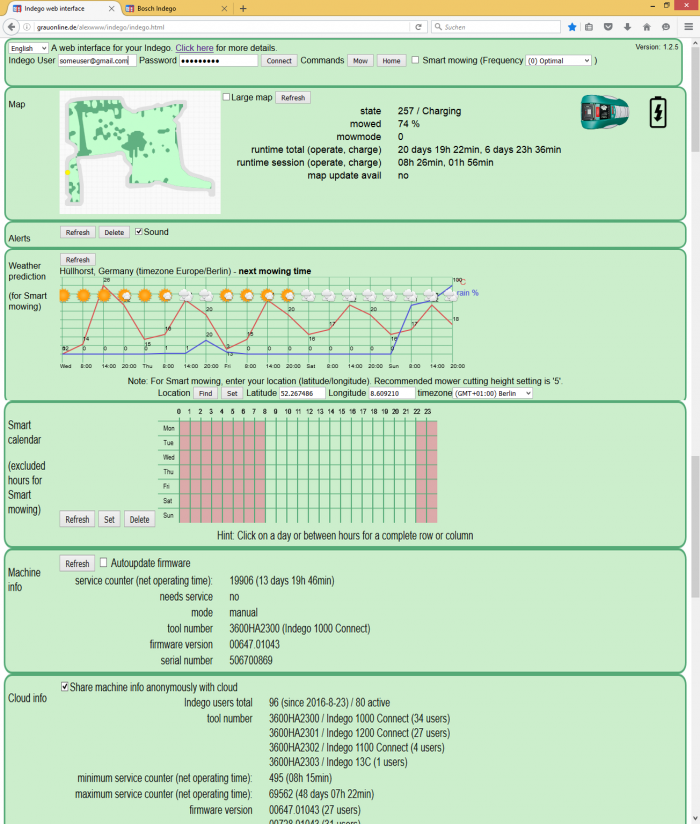
Example web interfaces we did built for autonomous garden mowers:
3. Web interface for Bosch Indego robotic lawn mowers
Components for self-driving mowers:
